FABRIK
2023年8月19日 2023年11月17日
说明
Forward and Backward Reaching Inverse Kinematics
逆运动学
Inverse Kinematics
给出子骨骼的位置, 反求推导出其所在骨骼链上n级父骨骼位置, 从而确定整条骨骼链的方法
末端执行器
End Effector
位于机械臂末端、与外界环境进行物理交互的工具, 也称作臂端工具 End-of-Arm Tooling , 缩写为EOAT
FABRIK的设置, 就是给出骨骼链和末端执行器的描述, 计算骨骼链各关节变换
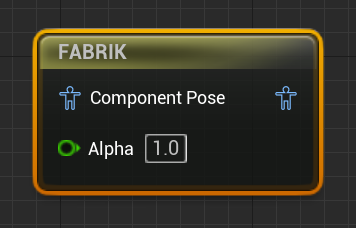
在动画蓝图中使用FABRIK
AnimGraph
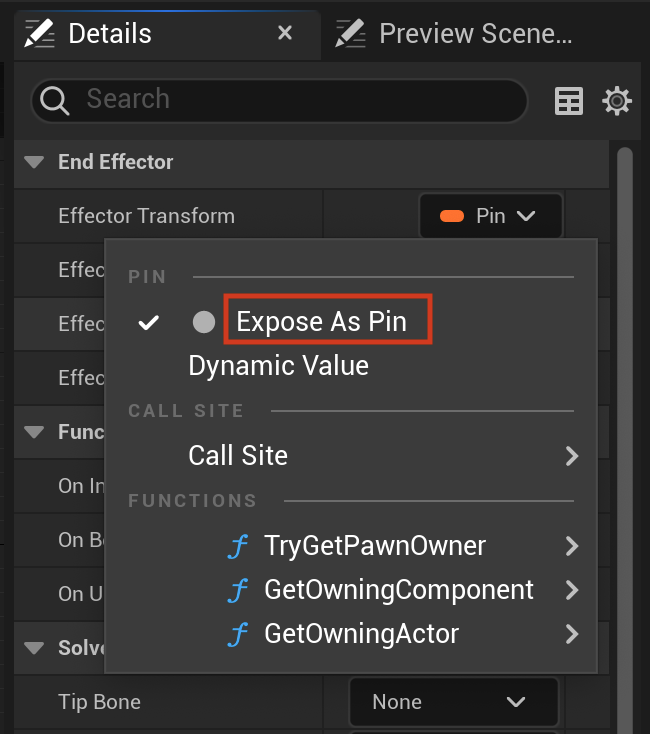
末端执行器变换默认作为针脚

切换末端执行器变换在细节面板设置
-
Details > End Effector > Effector Transform > 左键Pin, 取消Expose As Pin的勾选
-
FABRIK
-
Effector Transform
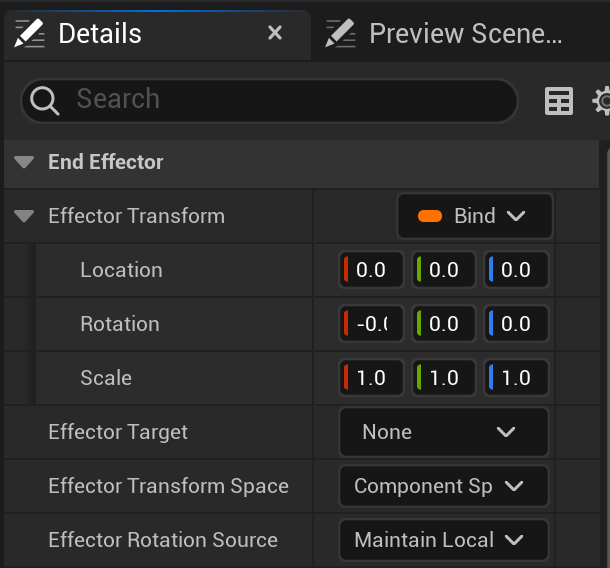
配置末端执行器
| - | |
|---|---|
| Effector Target | 在动画蓝图绑定的骨骼树中选取目标 |
| Effector Transform Space | 与Target类型有关, 默认Component Space, 骨骼对应Bone Space |
| Effector Transform | 相对于Target的变换 |
配置Solver
设置骨骼链
| - | |
|---|---|
| Tip Bone | 机械臂末端骨骼 |
| Root Bone | 机械臂根骨骼 |