介绍EQS资产
2023年11月6日 2023年11月17日
介绍EQS资产
类似行为树图表
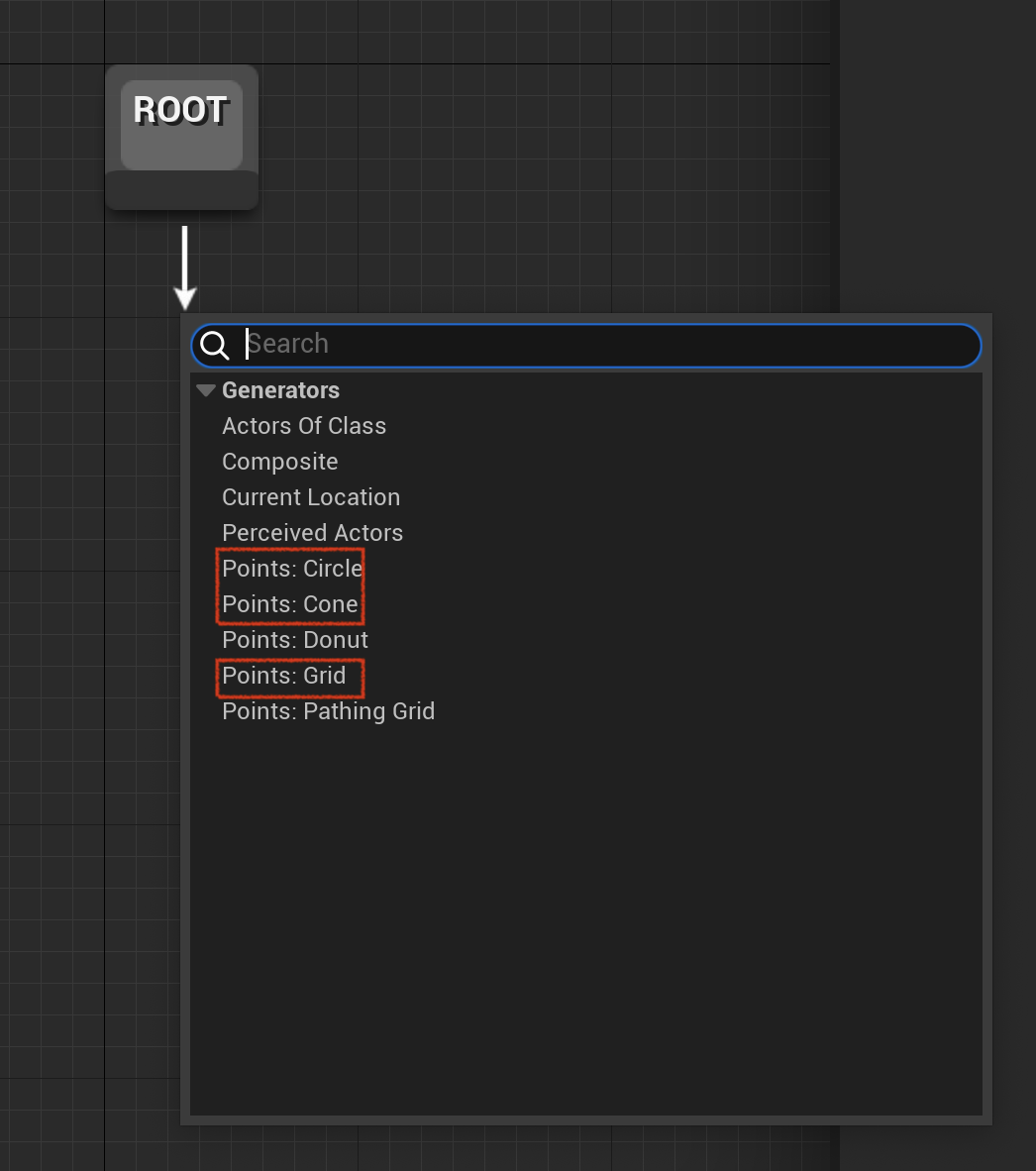
从Root出发, 可以设置各种生成器
随机目的地
双击打开EQS_RandomRoam
介绍下列生成器
| - | |
|---|---|
| Points: Grid | 方形点阵 |
| Points: Circle | 圆圈点阵 |
| Points: Cone | 扇形点阵 |
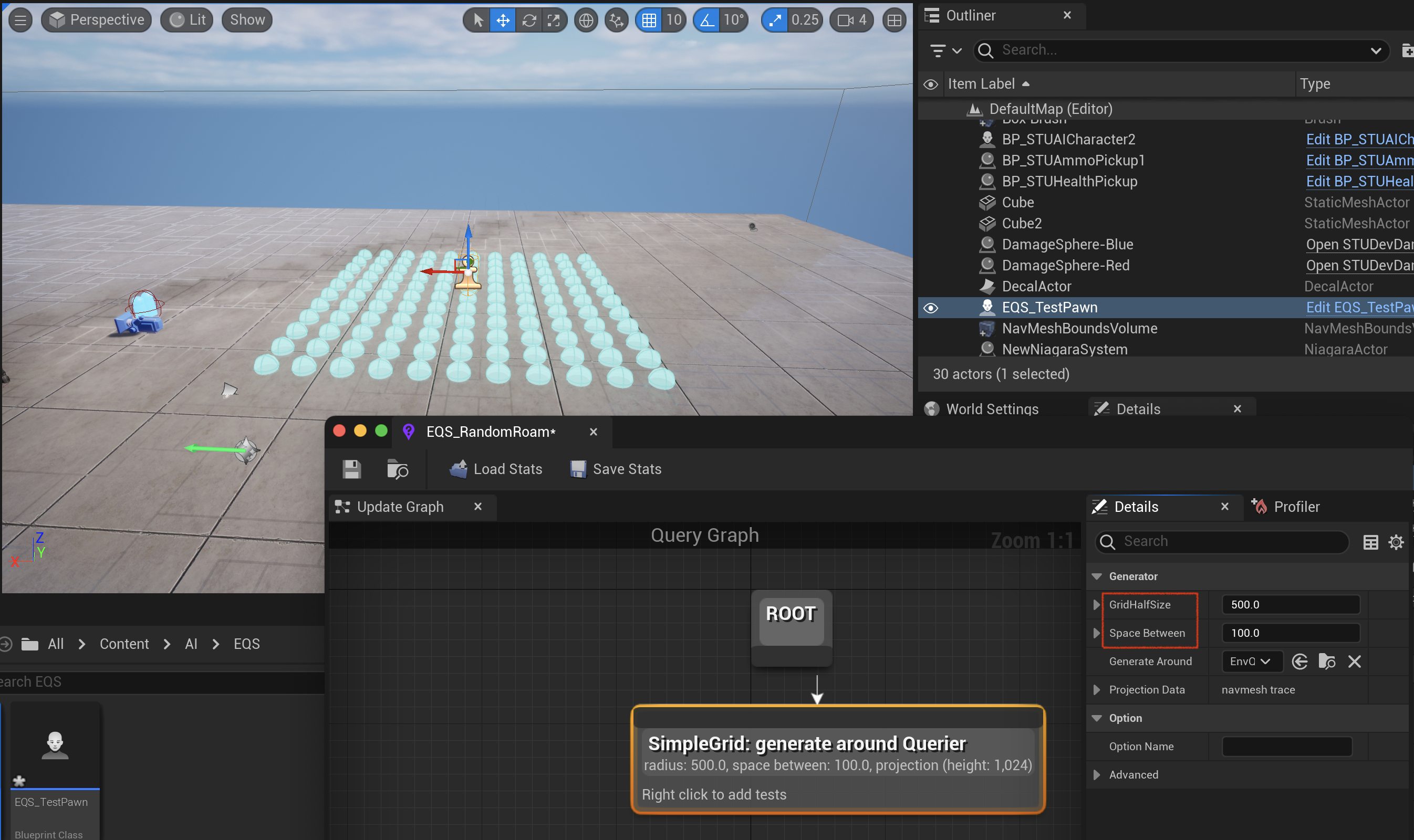
方形点阵
EQS_TestPawn身处方形点阵表示的位置区域中
| 可配置项 | |
|---|---|
| GridHalfSize | 点阵大小 |
| Space Between | 点阵密度 |
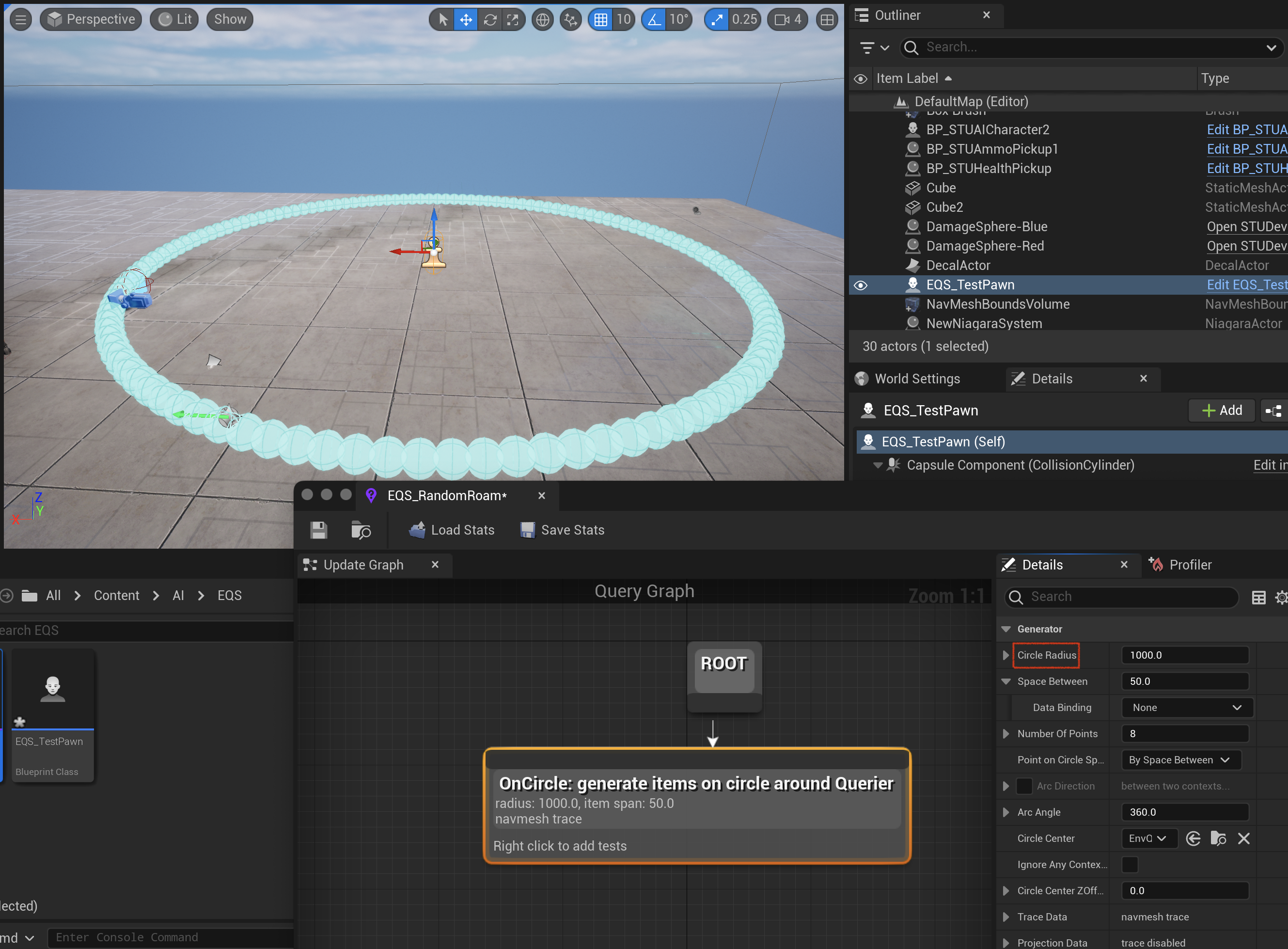
圆圈点阵
只圆形周长存在有效位置
| 可配置项 | |
|---|---|
| Circle Radius | 半径 |
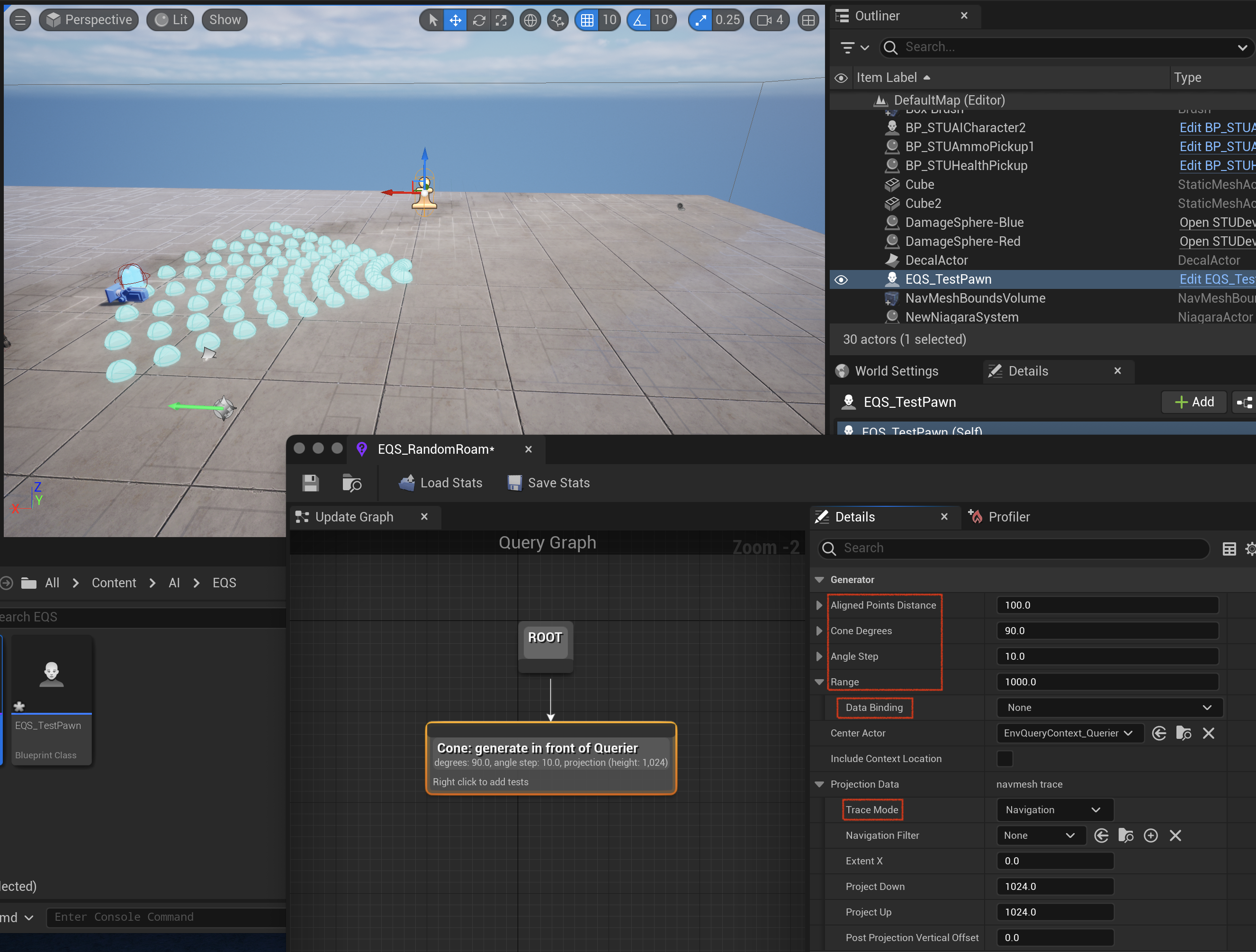
扇形点阵
EQS_TestPawn位于顶点处, 前进向量对应扇形中线
该模板用于选择前进时的下一个目的地, 因为前进向量的改变不会太突兀
| 可配置项 | |
|---|---|
| Aligned Points Distance | 射线上的点间距 |
| Cone Degrees | 顶角 |
| Angle Step | 射线密度 |
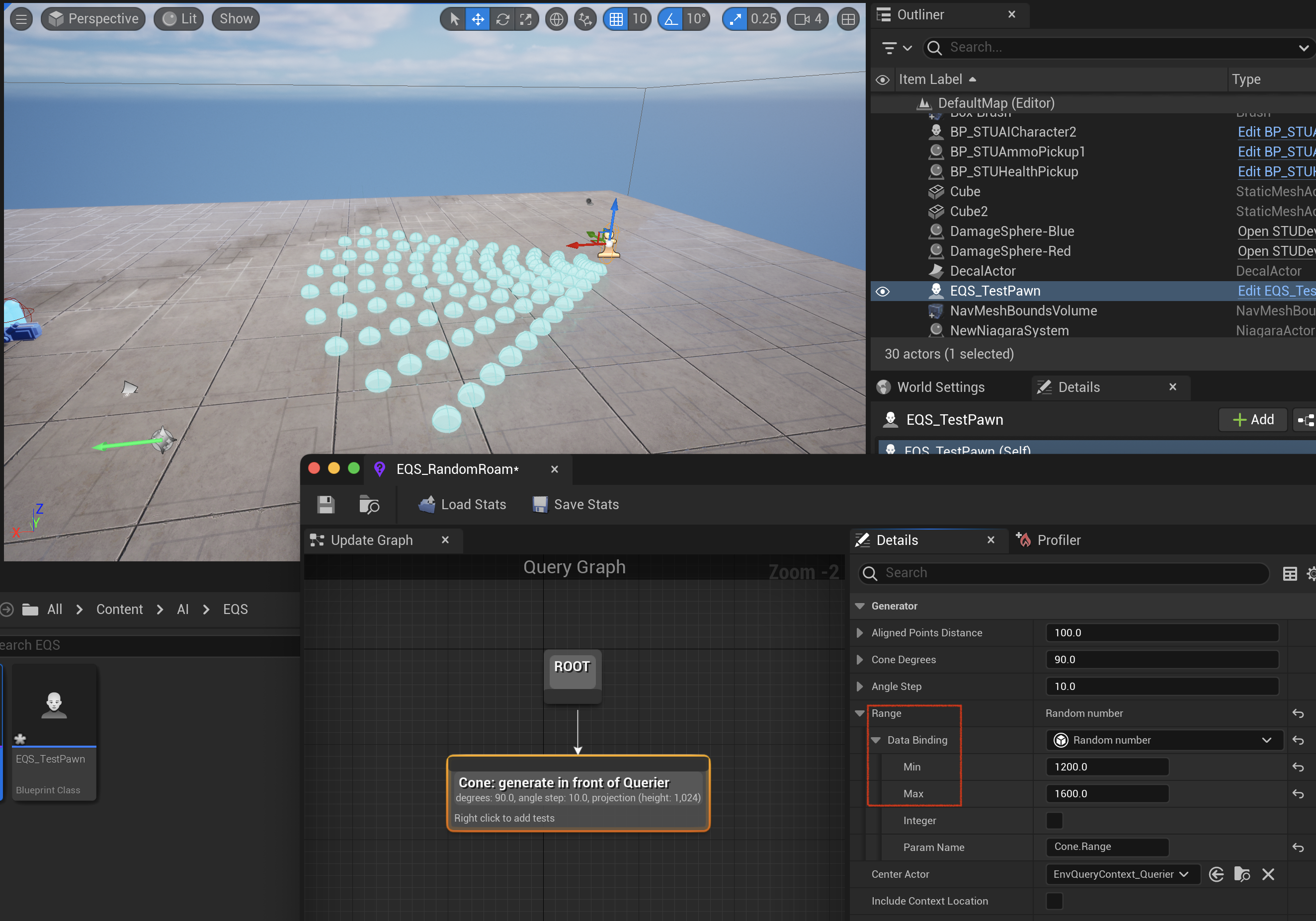
| Range > Data Binding = None, Range | 半径 |
-
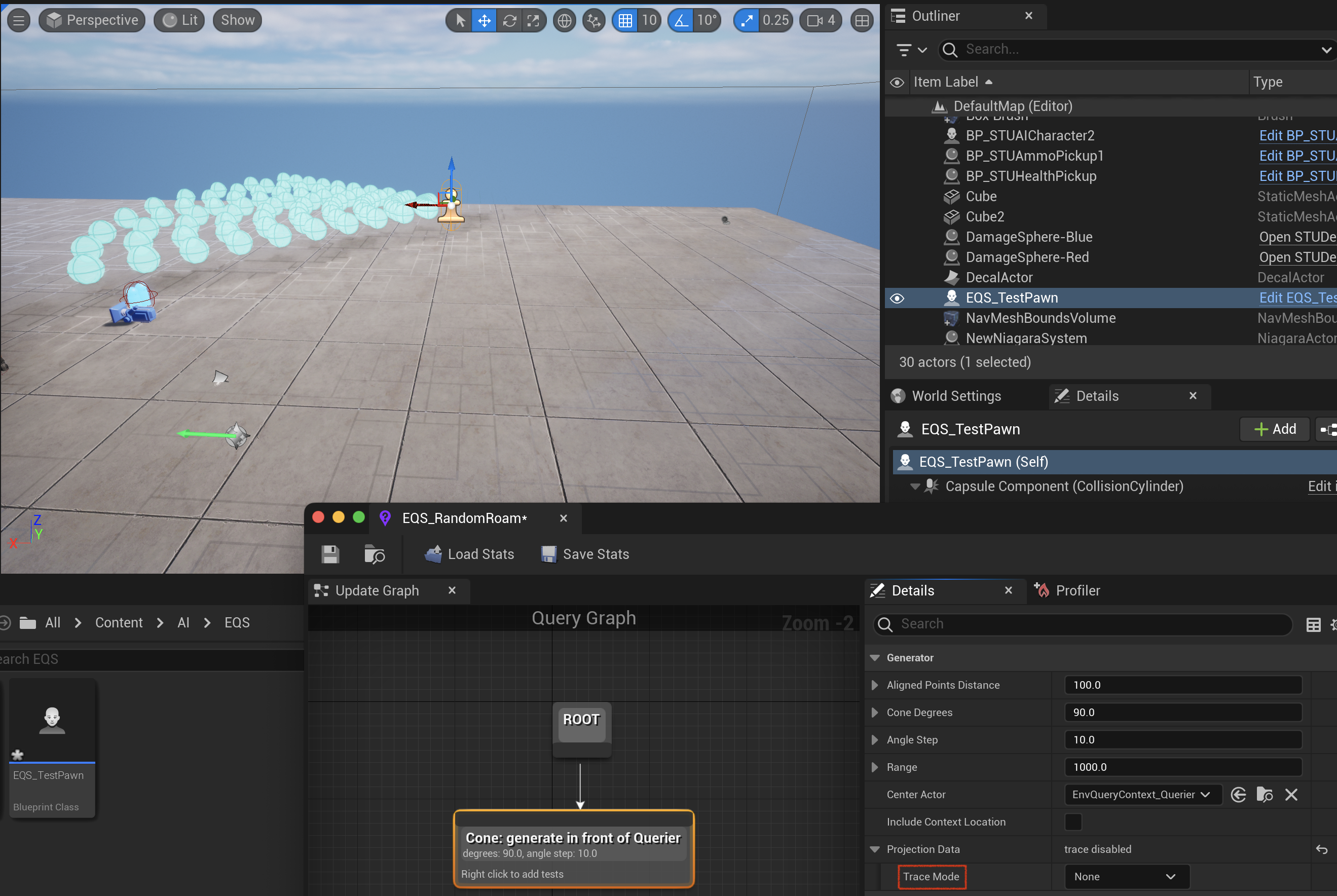
Projection Data > Track Mode
设置投影- Navigation 默认值, 显示投影到导航网格体的点阵 None 无投影, 会生成无法去到的位置点 Track Mode = None
-
Range > Data Binding
半径模板选项- None 默认, 固定值 Query Params Random number 设置随机数范围 Range > Data Binding = Random number
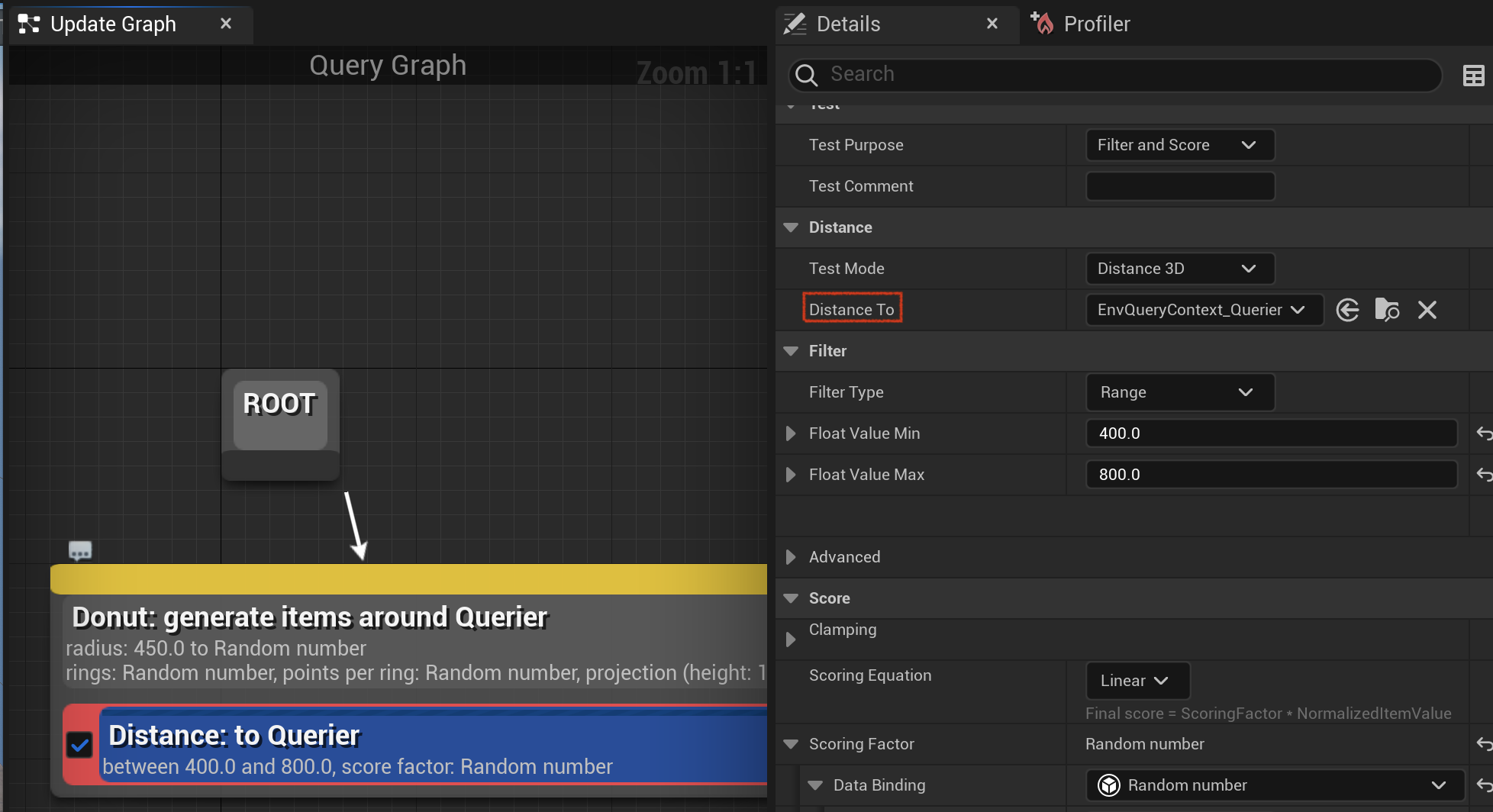
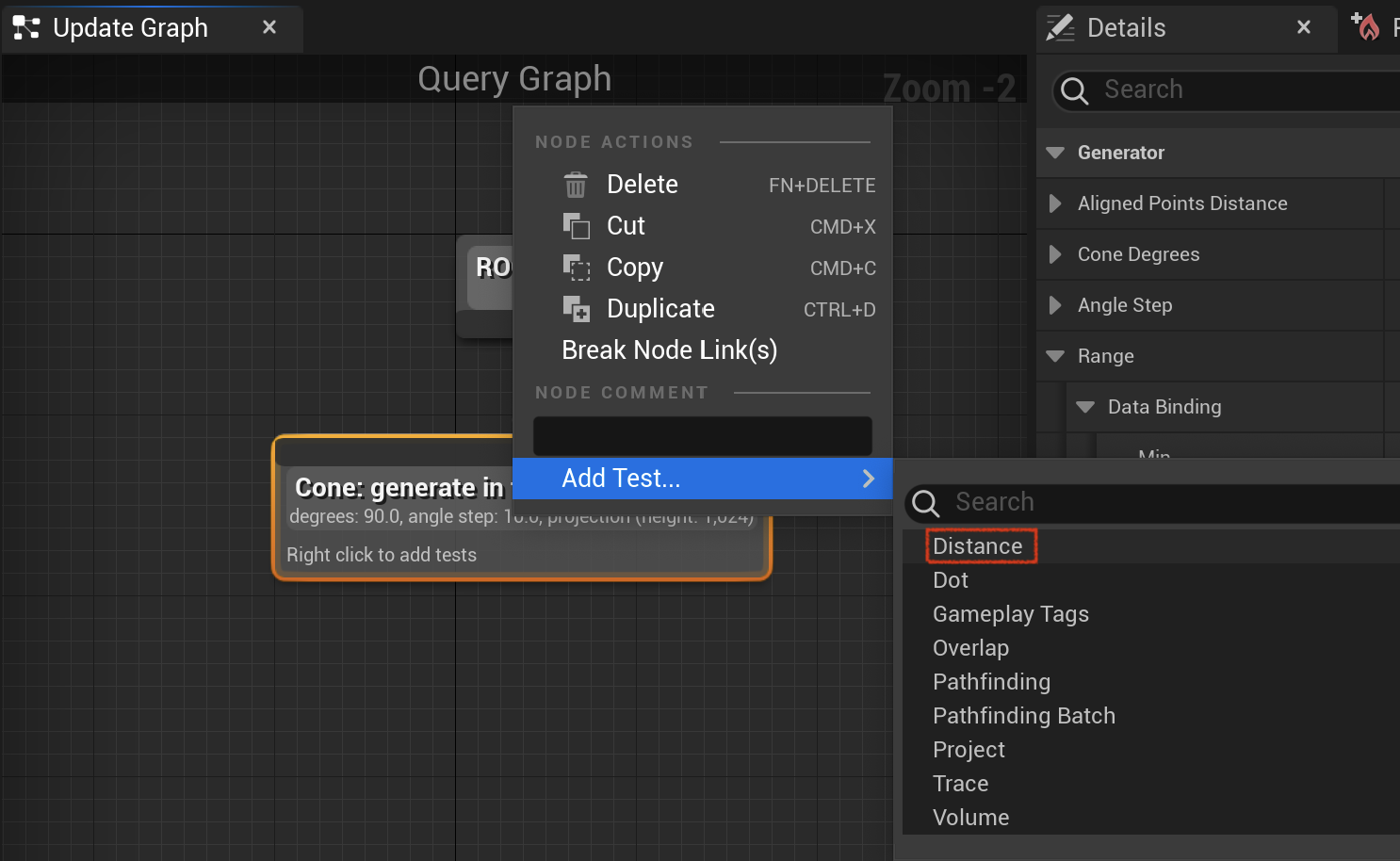
为扇形点阵添加限制条件
右键生成器, Add Test > Distance : 根据位置点到顶点的距离对位置点进行筛选
Details > Filter > Filter Type |
限制类型 |
|---|---|
| Range | 给定范围 |
| Minimum | 给定最小值 |
-
当前给定筛选距离范围, 最大值和最小值均为0, 所以无合适位置点
表示位置点的球型显示为蓝色: 不是合适的位置点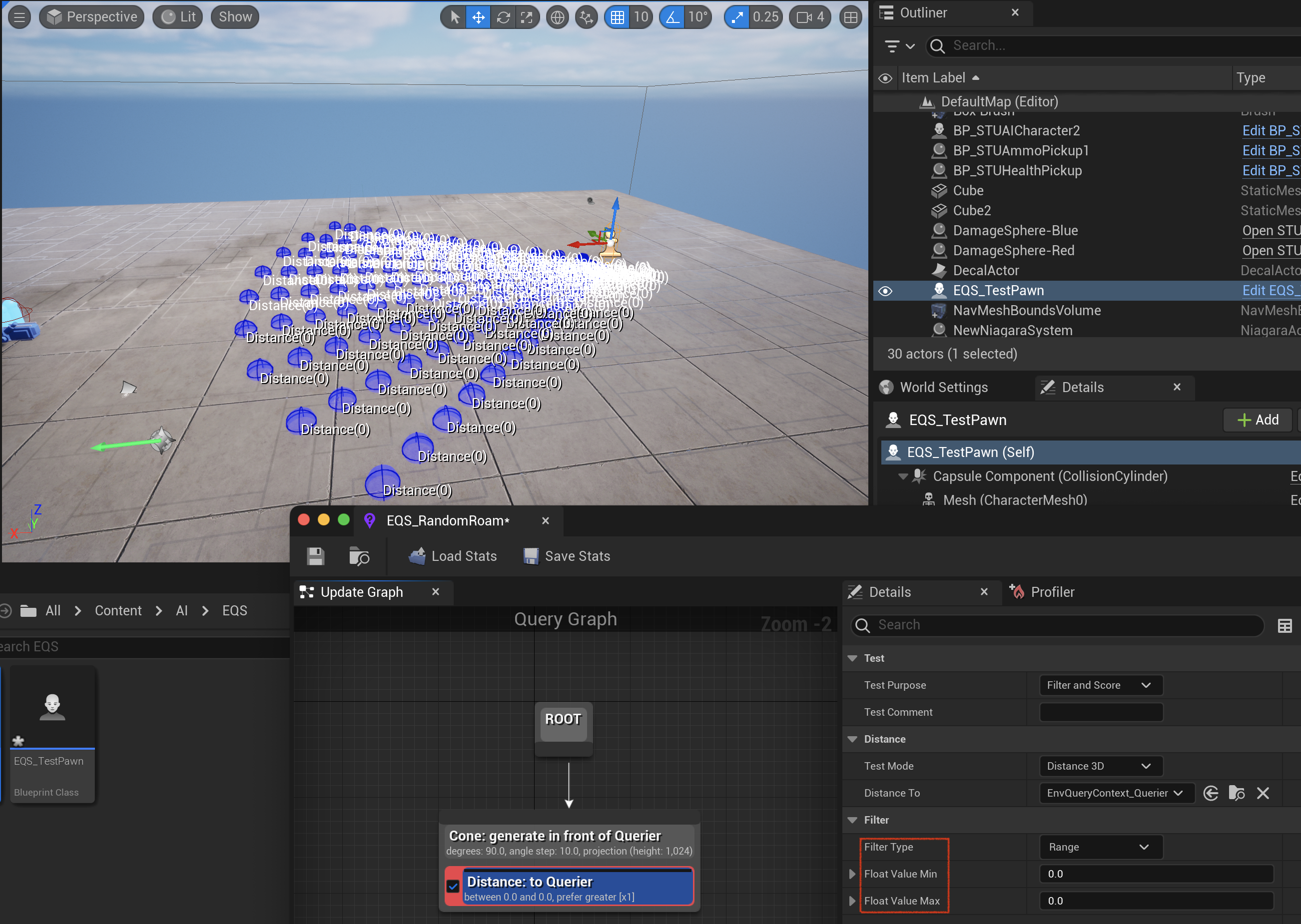
-
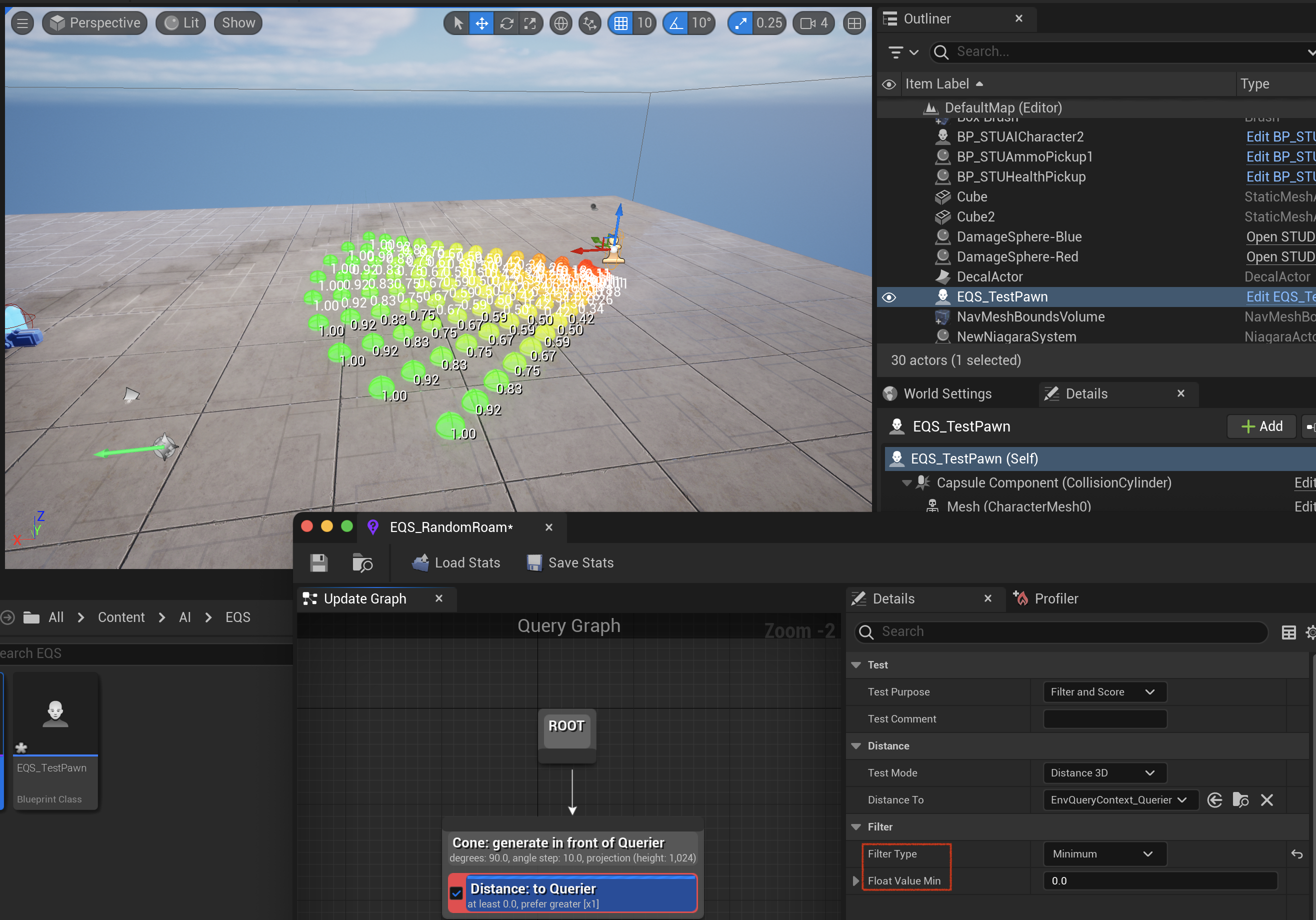
给定最小值
为每个位置计算到顶点的距离, 根据距离, 给出权重: 距离越大的点, 选中的可能性更高Float Value Min = 0.0: 颜色从红色到绿色, 权重由小变大
生成附近随机位置
| - | |
|---|---|
| 生成敌人附近的随机点 | 环状点阵 |
| 寻找敌人 | Context |
介绍新生成器
| - | |
|---|---|
| Points: Donut | 环形点阵 |
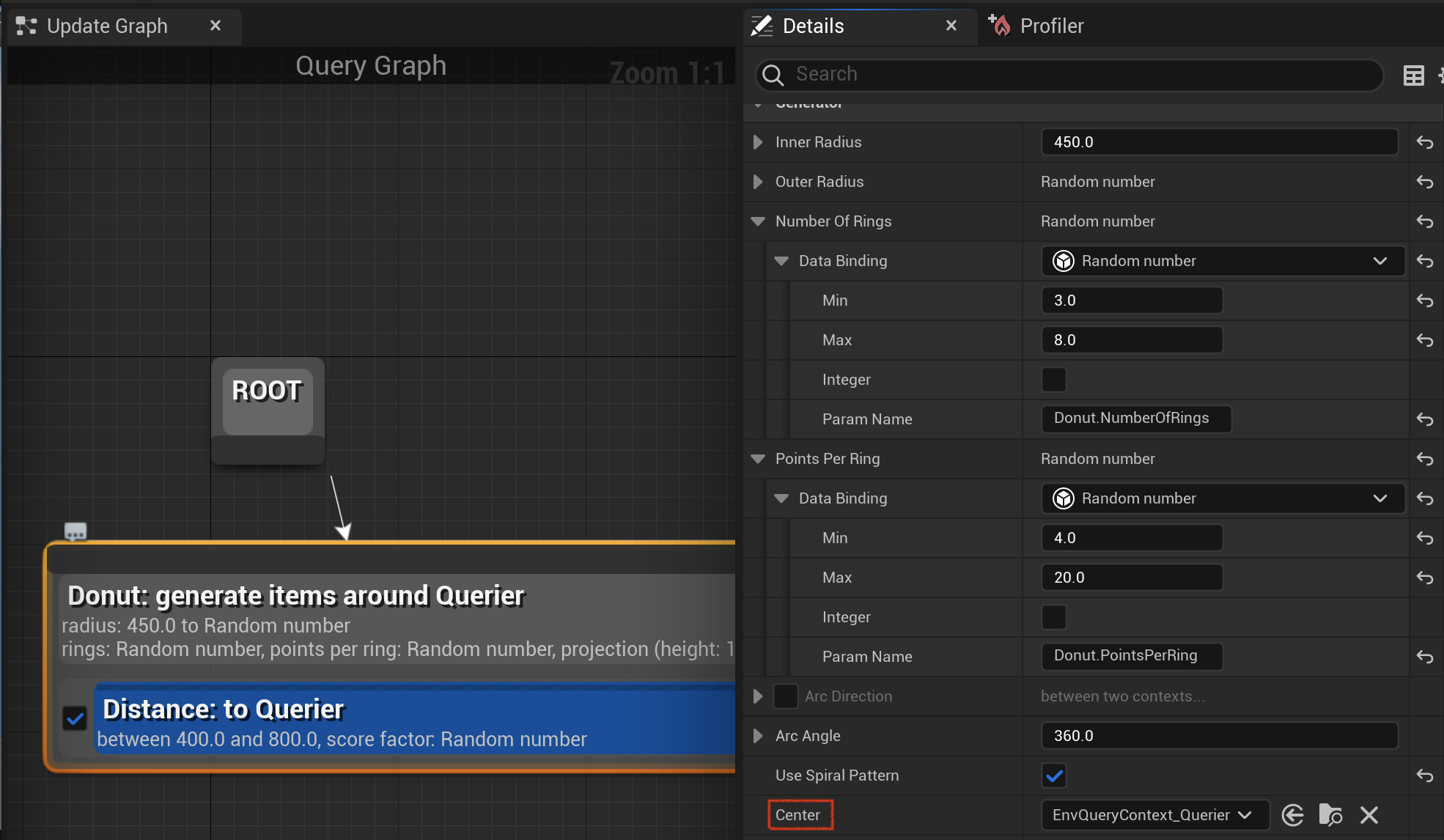
环状点阵
Points: Donut
| - | |
|---|---|
| Projection Data > Track Mode | 设置投影 |
| Inner Radius | 内圈半径 |
| Outer Radius | 外圈半径 |
| Number Of Rings | 半径上的点个数 |
| Points Per Ring | 一圈上的点个数 |
| Arc Angle | 圆环扇形 |
| Use Spiral Pattern | 螺旋模式 |
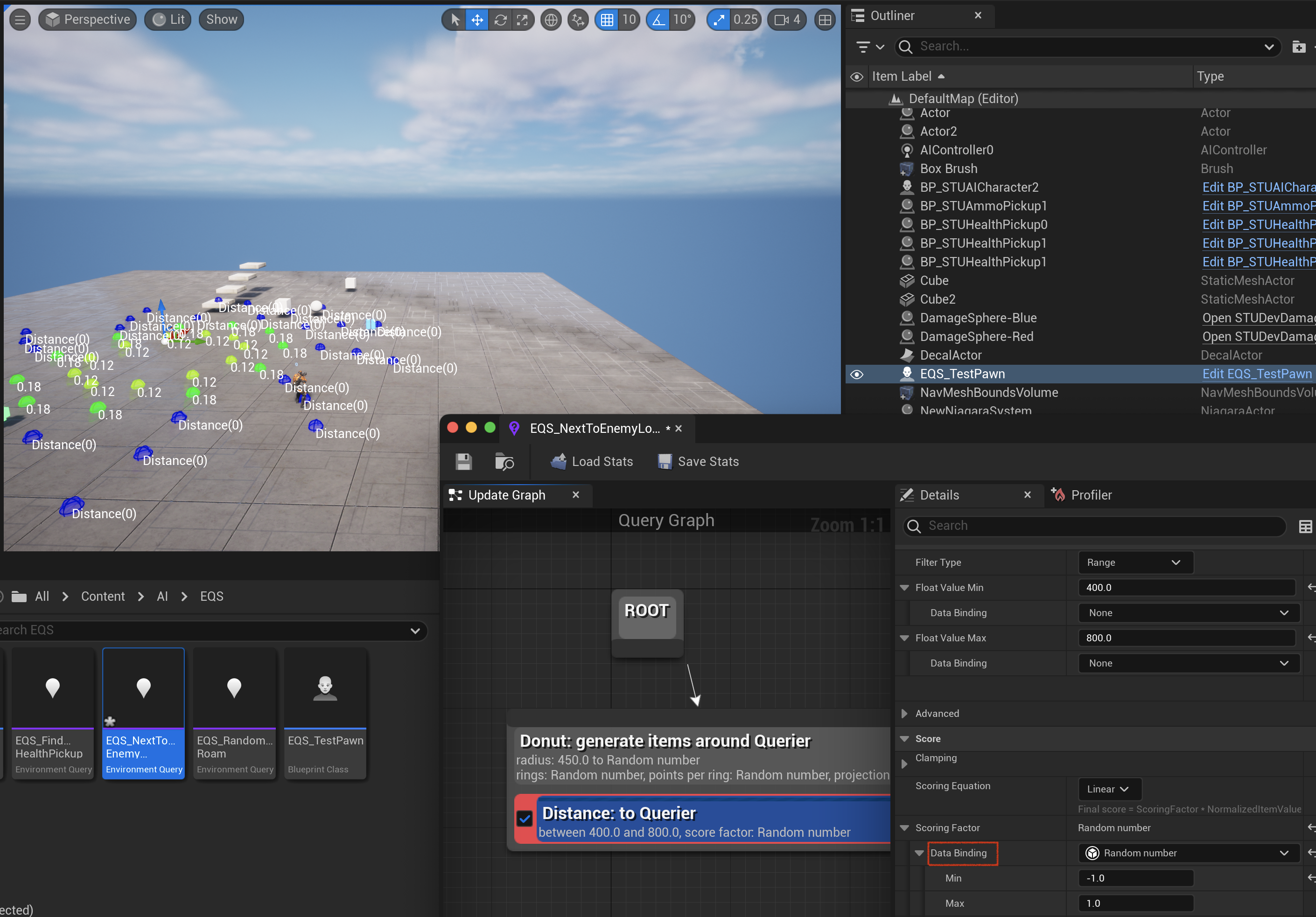
为环状点阵添加限制条件
使用Distance
| - | |
|---|---|
| Filter > Filter Type | 筛选方式 |
| Score > Scoring Factor | 权重比: 1则越远越大, -1则越近越大 |
-
权重比为1
最外层有几圈蓝色位置点, 均无效, 权重为0; 有效位置点由红色变为绿色, 权重由0变为1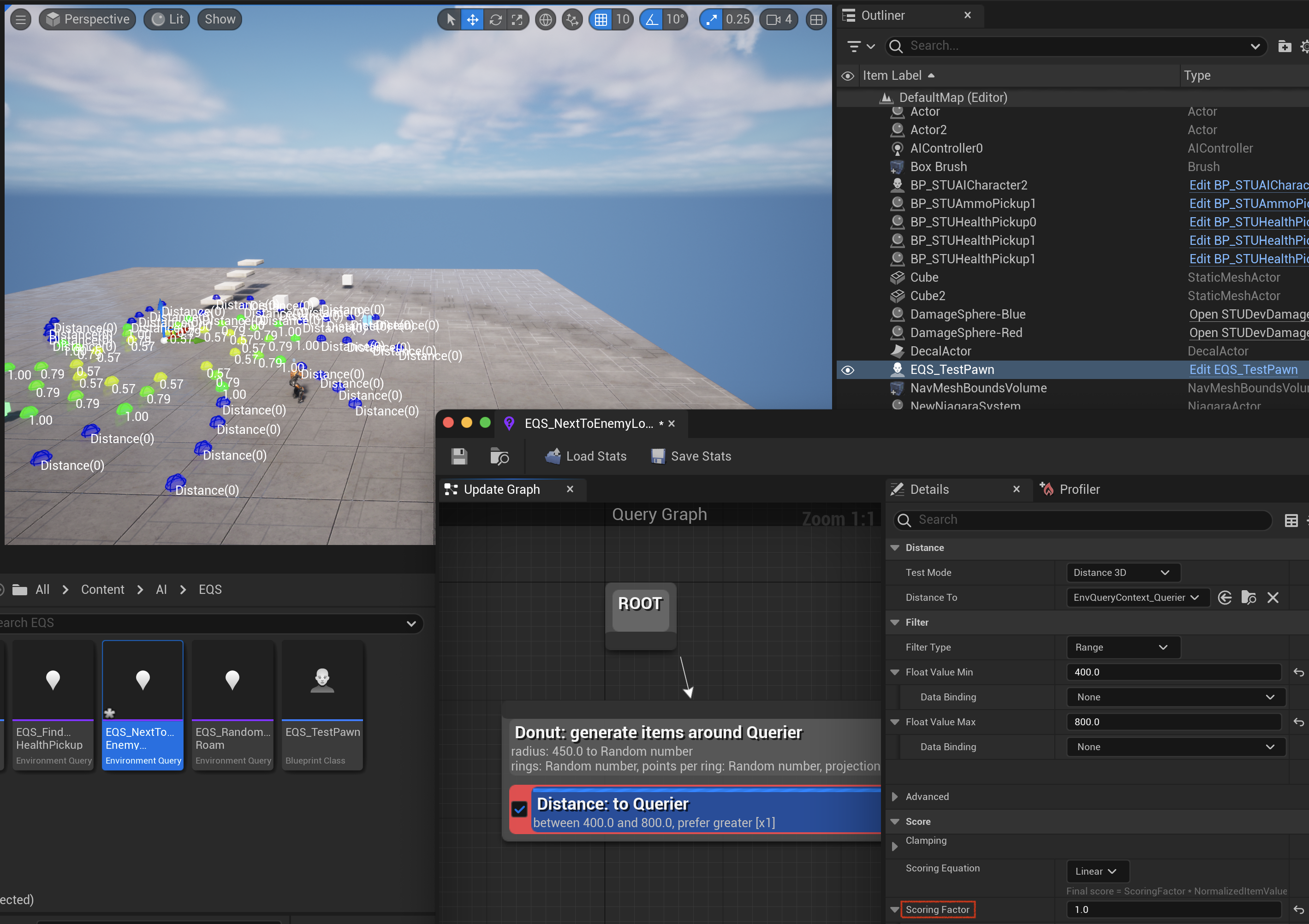
-
权重比为-1
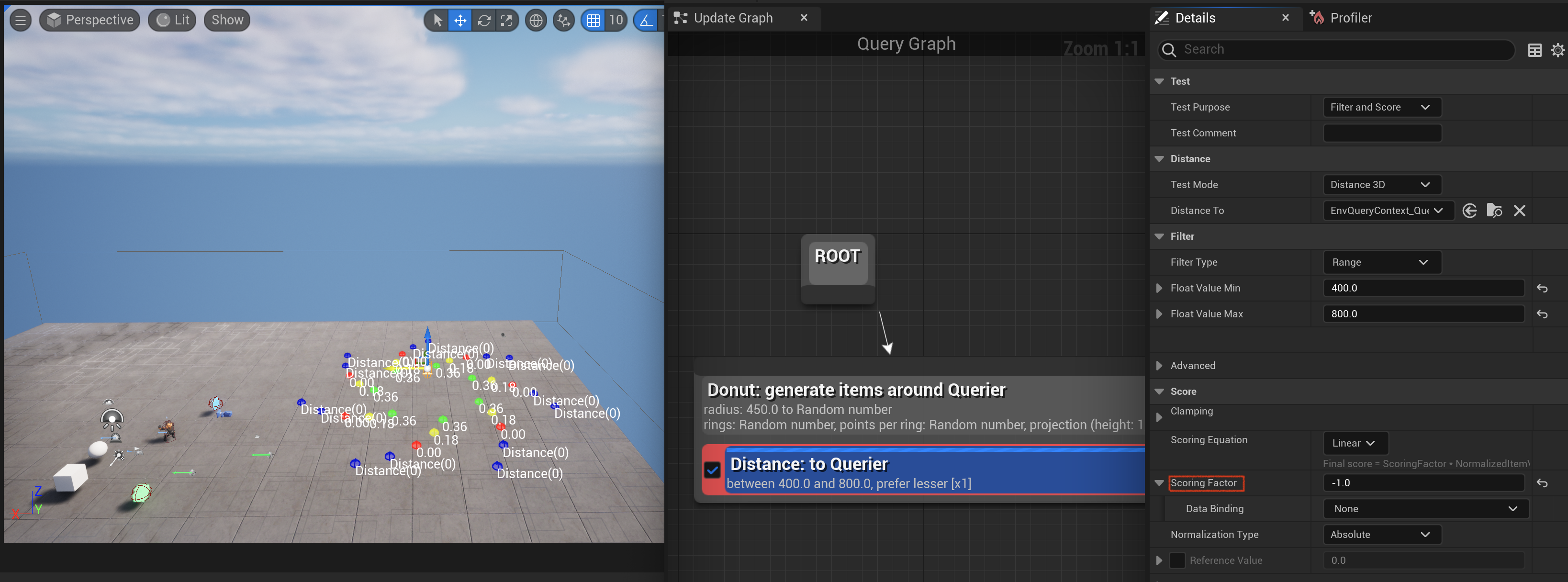
-
给定权重比范围, -1 ~ 1
设置中心点
环状点阵生成器中心点选项
选中环状点阵, Details > Center
| - | |
|---|---|
| EnvQueryContext_Querier | 默认值, 使用EQS的上级Pawn; 可以自定义EnvQueryrContext |
环状点阵距离限制条件距离计算的参照点选项
选中Distance, Details > Distance > Distance To
| - | |
|---|---|
| EnvQueryContext_Querier | 默认值, 使用EQS的上级Pawn; 可以自定义EnvQueryrContext |